

Robot do nauki programowania w języku C++.
W pełni działający przetestowany.
Robot "PĘDZILINER" robot dzięki któremu z wielką przyjemnością nabędziesz wiedzę z programowania mikrokontrolerów.
Jeśli chcesz w bardzo przyjemny poznać największe tajniki programowanie Robot "PEDZILINER" jest idealnym rozwiązaniem. Pozwoli Ci w szybki sposób nabyć niezbędną wiedzę. Dzięki temu robotowi opanujesz w miły sposób wiele zagadnień z dziedziny programowania. Programowanie w czystym C++.
Pędziliner - dane techniczne:
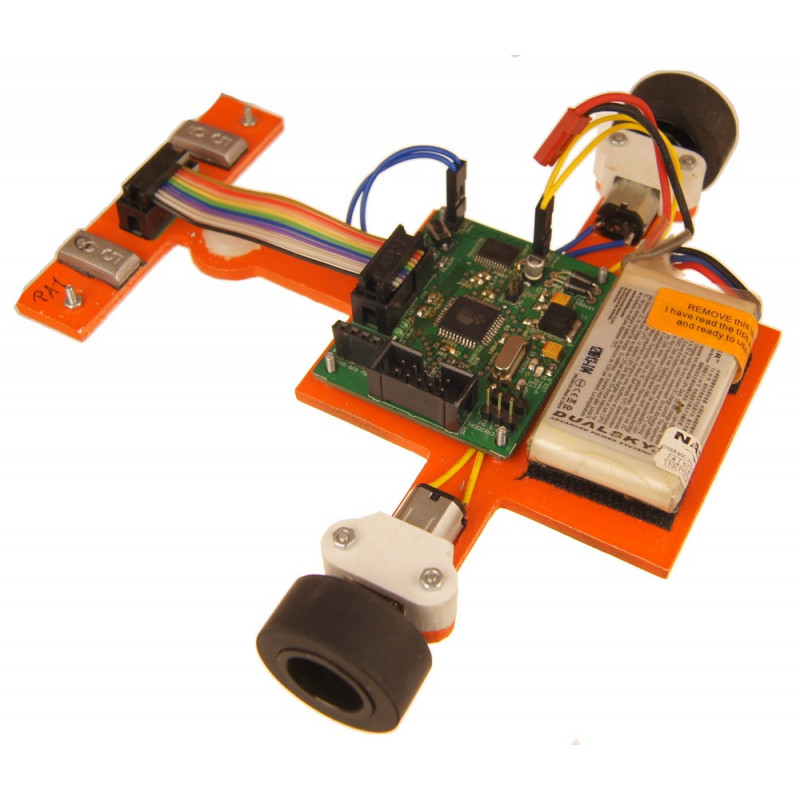
Pędziliner - opis:
Robot typu podążanie za linią line fallower jest to zabawka edukacyjna dzięki której w przyjemny sposób można nauczyć się programowania. Zadaniem Robota typu line folower jest jak najszybsze przejechanie po wyznaczonej czarna linia na białym tle tarasie. W robocie zastosowano jeden z najbardziej popularnych mikroprocesorów Atmega16-AU.
Pędzilinier - działy z zakresu programowania mikrokontrolerów jakie uda się opanować:
Pędziliner - schemat płytki drukowanej zastosowanej w robocie:
Pędziliner - mózg:
Pędziliner - zmysły:
Poniżej tabela z informacjami o zastosowaniu poszczególnych pinów mikroprocesora.
Sposób programowania robota:
Robot ma zabudowane na płytce gniazdo pod najbardziej standardowy interfejs programowania JTAG. Robota można programować bez odłączania zasilania.
Dodatkowo wymagana jest biała kartka na której
Program przykładowy:
Sposób podłączenia:

Robot do nauki programowania w języku C++.
W pełni działający przetestowany.