- BRAK


Dane techniczne:
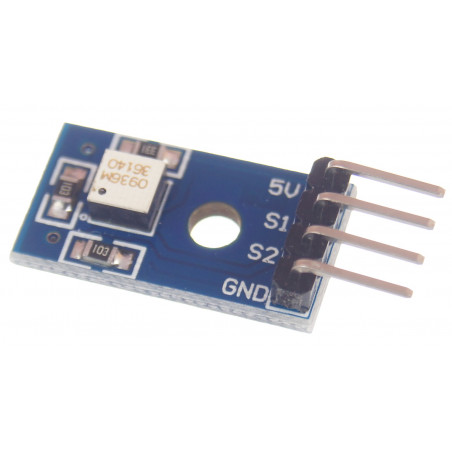
Czujnik wykrywa zmianę położenia w czterech kierunkach: przód, tył, prawo, lewo.
Dane techniczne: Napięcie zasilania: 3,3V lub 5V. Wyjścia cyfrowe S1 i S2, masa GND.
 Ilustracja 1: przykład (źródło: wyszukiwarka obrazów)
Ilustracja 1: przykład (źródło: wyszukiwarka obrazów)
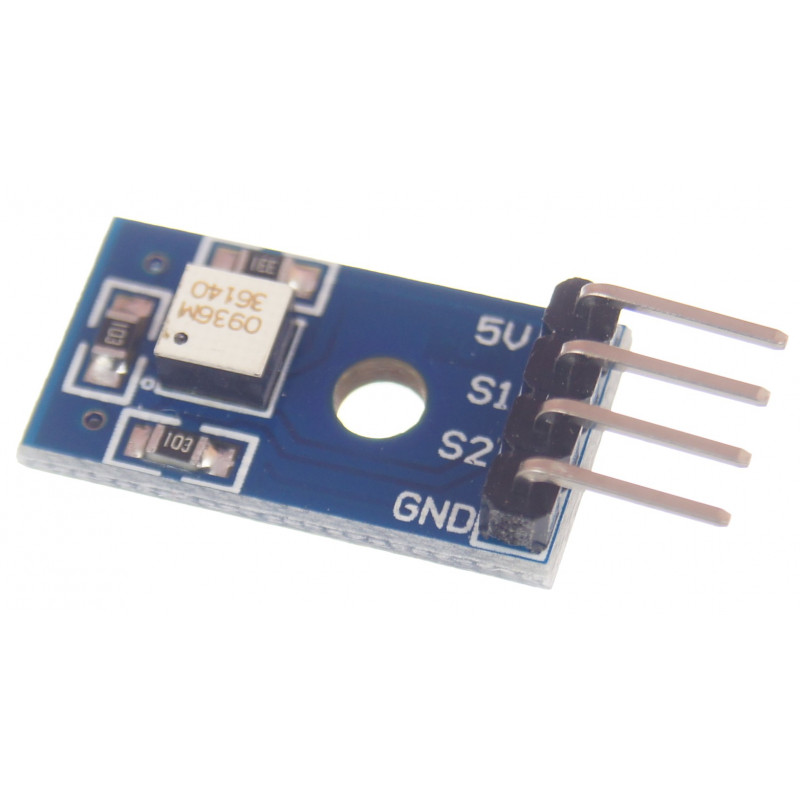
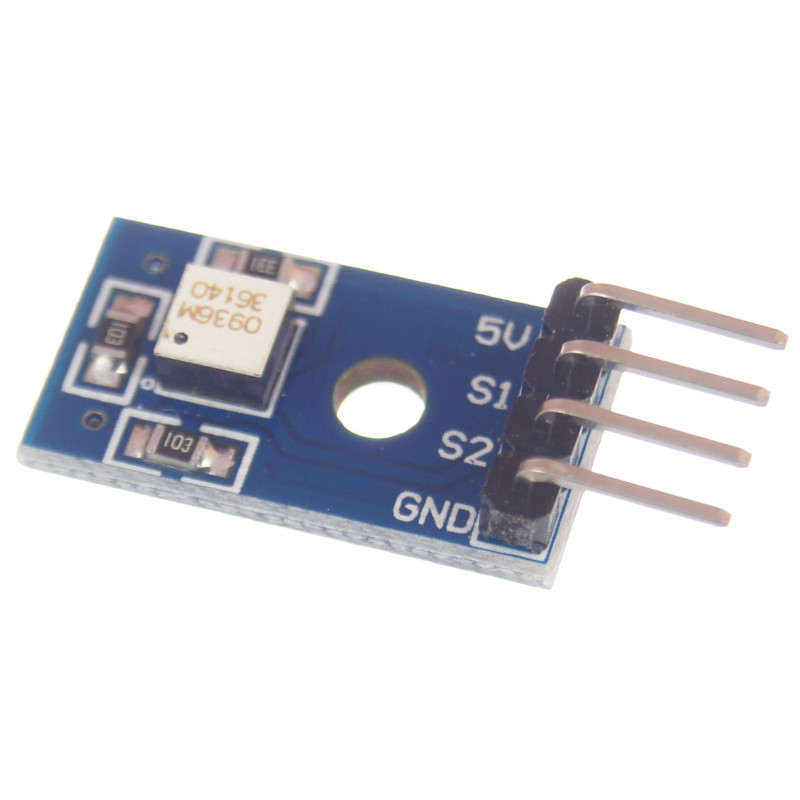
 Ilustracja 2: przykład (źródło: wyszukiwarka obrazów)
Ilustracja 2: przykład (źródło: wyszukiwarka obrazów)
To schemat poglądowy dla Arduino Nano. Jeśli Twój moduł ma inne oznaczenia pinów, kieruj się jego dokumentacją (pinout).
| Element | Arduino Nano | Uwagi |
|---|---|---|
| VCC | 5V | Zasilanie |
| GND | GND | Masa |
| S1 | D2 | Sygnał 1 |
| S2 | D3 | Sygnał 2 |
void setup() {
Serial.begin(9600);
pinMode(2, INPUT);
pinMode(3, INPUT);
}
void loop() {
int s1 = digitalRead(2);
int s2 = digitalRead(3);
Serial.print(s1);
Serial.print("/");
Serial.println(s2);
delay(500);
}void setup() {
Serial.begin(9600);
pinMode(2, INPUT);
pinMode(3, INPUT);
}
void loop() {
int s1 = digitalRead(2);
int s2 = digitalRead(3);
if (s1 == LOW && s2 == LOW) {
Serial.println("Brak ruchu");
} else if (s1 == LOW && s2 == HIGH) {
Serial.println("Ruch w prawo");
} else if (s1 == HIGH && s2 == LOW) {
Serial.println("Ruch w lewo");
} else if (s1 == HIGH && s2 == HIGH) {
Serial.println("Ruch do przodu");
}
delay(500);
}Pamiętaj o odłączeniu zasilania przed
Dane techniczne: